
The blog you are about to read (or perhaps quickly click away from after realizing there’s math involved) is merely the cumulative notes of my AP Physics 1 study. I therefore suggest that caution be taken when reading this material, as complete accuracy is not guaranteed. That said, I’m well-read and pedantic enough that I am fairly confident in this blog’s correctness.
In the coming weeks, I plan to publish many essays like this, following the words of the late, great physicist Nicholas Wheeler:
I cannot gain the feeling that I “understand” a subject until I have done my best to write about it.
Upon a similar journey I thus embark – into the subject of forces, torques, and rotation.
What is torque?
Suppose you are looking down at a door which has multiple forces being applied on it. Each force is applied one at a time and at different positions until the door has turned through an angle of 90°.
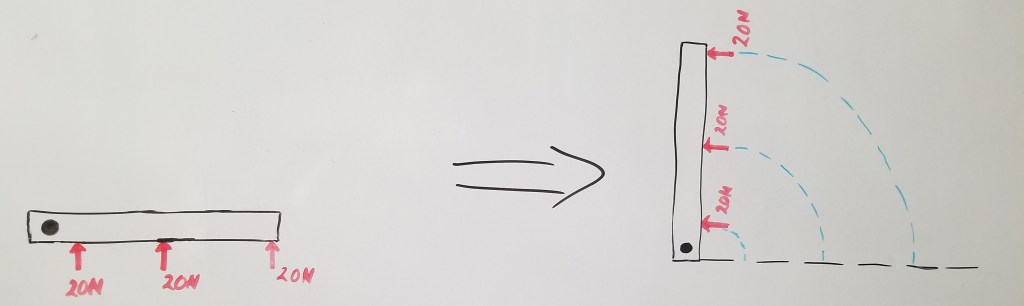
An interesting question to ask is, which force causes the greatest angular acceleration?
To answer this question, consider the following reasoning:
Despite each force acting through the same angular displacement, they do not act through the same linear displacement (arc length). You can see that the farther the force is from the axis of rotation, the greater the linear displacement.
Recall that the formula for work is given by W=Fd, where F is the force applied and d is the displacement through which the force is applied. It is seen from the formula that the greater the displacement d, the greater the work done. Therefore, because the rightmost force in the diagram acts through the greatest displacement, it does the most work.
Work is just the energy transferred, though. Thus, the rightmost force transfers the most energy to the door. But since there is no potential energy, the force specifically transfers only kinetic energy to the door.
The more kinetic energy given to the door, the faster the door will angularly accelerate. Therefore, the rightmost force causes the greatest angular acceleration.
From this discussion, you can see that rotational dynamics is a tad strange. It is not enough to know just the force applied. We must also know the position vector from the axis of rotation to the point where the force is applied.
Because of this fact, in rotational dynamics, we generally don’t think in terms of force. We instead think in terms of a concept known as torque, a concept that includes both the magnitude and position of a force.
Denoted by the Greek letter τ (tau), torque is defined as the magnitude of the force (F) multiplied by the magnitude of the position vector (r), which starts at the axis of rotation and stretches to the point of contact of the force:
τ = rF
The force in this formula must be completely perpendicular to the position vector, since only perpendicular forces can cause torque. However, if the force is at an angle to the position vector, a more general formula can be used:
τ = rFsinθ.
where θ is the angle between the force and the position vector. Here, the sinθ isolates the component of F that is perpendicular to r. Since we are multiplying a displacement by a force, the units are Newton-meters, Nm.
From these equations, you can see that τ is directly proportional to r: double the position vector r, torque τ doubles.
The possible position vectors of the forces from the previous diagram are shown below:
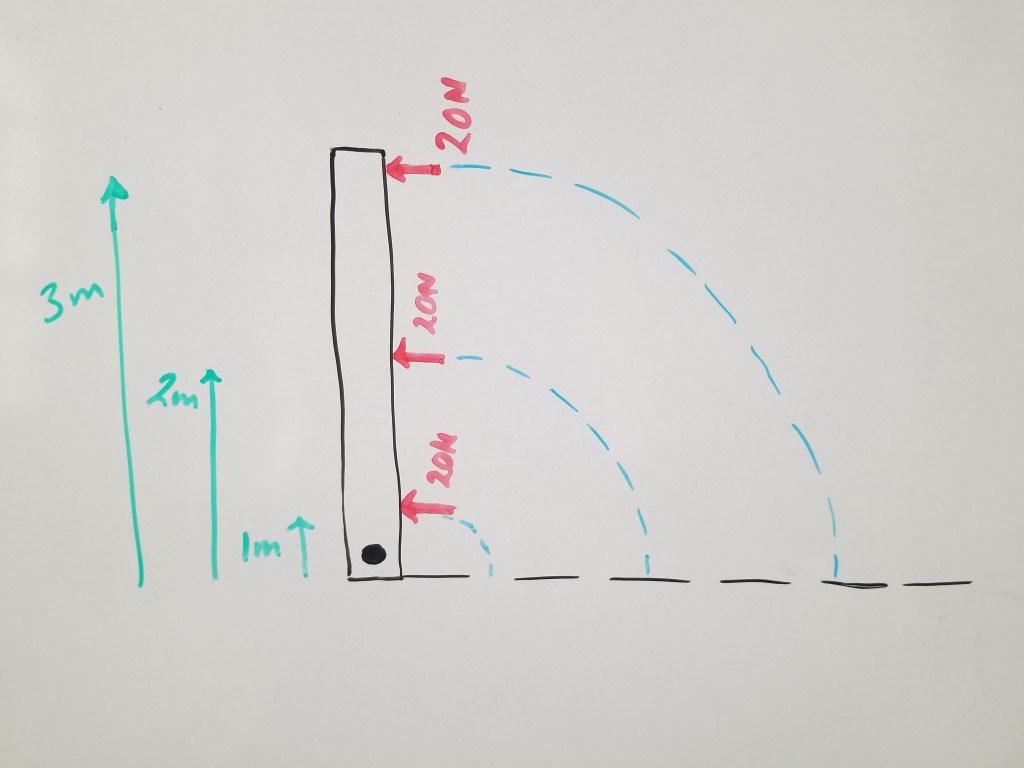
Using the definition of torque, we can see that the lowest force produces a torque of τ = (1m)(20N) = 20 Nm; the middle force produces a torque of τ = (2m)(20N) = 40 Nm; and the top force produces a torque τ = (3m)(20N) = 60 Nm.
A crucial thing to note is that torque is a vector. While in more advanced physics, τ is considered to act in the z-dimension, in AP Physics 1, we can consider τ as being directed either clockwise (which we define as negative) or counterclockwise (which we define as positive). As you might expect, clockwise torques produce clockwise rotations, whereas counterclockwise torques produce counterclockwise rotations.
Another thing to note is that the formula τ = rF will only give us the magnitude of the torque. The sign must be determined by context (e.g., the direction might be explicitly stated in the problem or perhaps the diagram will show it). In the above example, it is obvious that all of the above forces will produce counterclockwise torques (because they all cause counterclockwise rotations). The torques, therefore, are positive.
Before we try to solve any problems with torque, some terminology should be defined:
- A rotational system is a system that, as you might expect, rotates. A door rotating on its hinge is a rotational system.
- If multiple torques act on a rotational system, the sum of those torques is the net torque Στ. Be sure to add counterclockwise torques but subtract counterclockwise torques.
- If the net torque on a rotational system is zero (Στ = 0), the system is said to be in rotational equilibrium. That means the system undergoes zero angular acceleration (α = 0). It either doesn’t spin at all or it spins at a constant angular velocity. (This is analogous to how ΣF = 0 implies translational equilibrium.)
- Torque is the rotational analog of force. Just like force causes translational acceleration, torque causes angular acceleration.
With that said, let’s do some rudimentary problems.
Problems
An easy one:
You exert a 20N force on a revolving door, but a person accidentally exerts a force F that opposes your force, as modeled below. The door does not rotate.
What is the magnitude of force F?
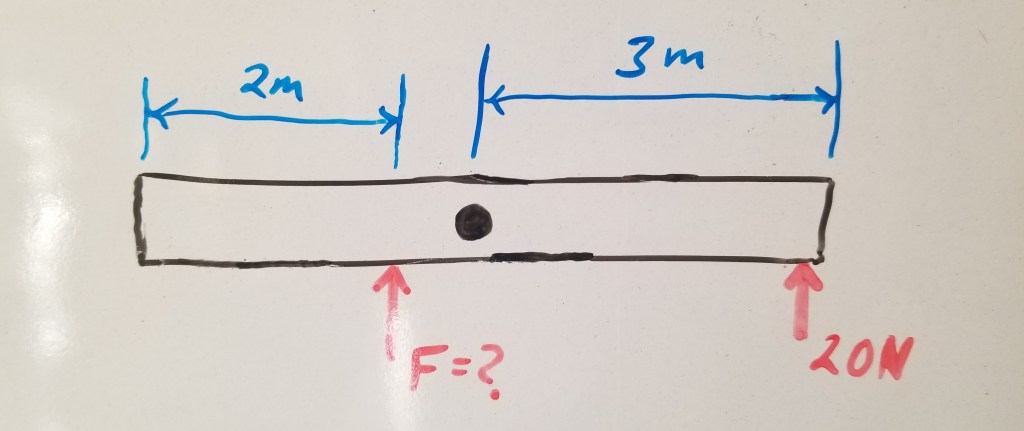
Soln. Since the door doesn’t rotate, it must be in rotational equilibrium; i.e., the net torque must be zero.
The torque produced by the 20N force is counterclockwise and is thus positive. The torque produced by F is clockwise and is thus negative. Each force’s position vector is measured from the axis of rotation to the force. Thus, the r of the 20N force is 3m, and the r of F is 1m. Setting up the conditional statement,
Στ = (3)(20) – (1)(F) = 0
60 – F = 0
F = 60 N
The person must be applying a force of 60N.
A slightly more complex one:
Three people exert forces on a revolving door, as modeled below. What is the net torque Στ on the door?
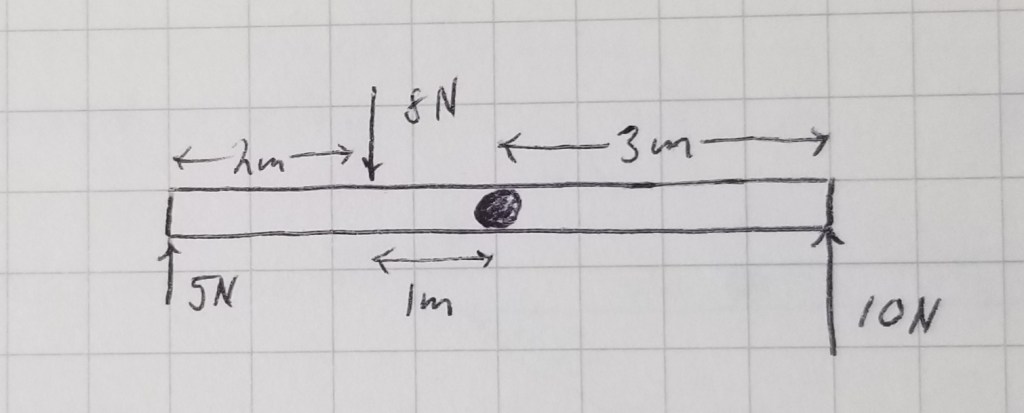
Soln. Simply add all of the torques together, and remember that the position vectors are measured from the axis of rotation.
Στ = -(3)(5) + (1)(8)+ (3)(10) = -15 +8 + 30 = 23Nm
A counterclockwise net torque of magnitude 23Nm results.
A problem where the force is angled:
A force is applied on a rod at a 60° angle, as shown below. What is the torque that results?
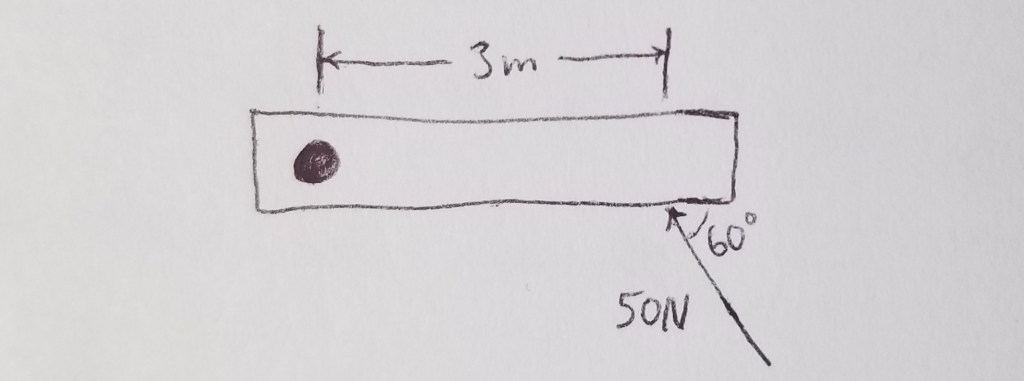
Soln. Use τ = rFsinθ:
τ = (3)(50)sin(60°)
= (150)(√(3)/2)
=75√3
≈130Nm
Newton’s second law for rotation
For translational motion, Newton’s second law states that the acceleration of an object of mass m resulting from a net force is given by
a = ΣF/m
It shouldn’t seem too surprising to know that there is a rotational equivalent for this. Moreover, from me stating all this exposition, it also shouldn’t seem too surprising that I am now going to derive this equation from first principles. (I found this derivation from a Khan Academy video.)
Consider a ball being swung from a string:
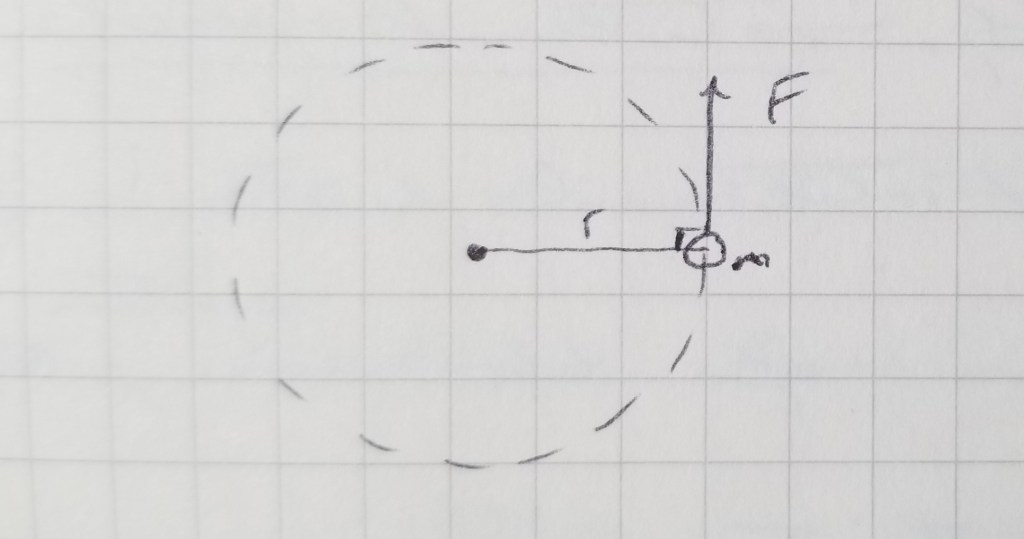
The ball can be considered as a point mass m (i.e., a point where all of the mass is concentrated) that swings at a distance r from the axis.
Because a tangential force F is being applied, the ball undergoes tangential acceleration as well as angular acceleration (which is what we’ll be solving for).
The tangential acceleration is related to the force by F = ma_tan.
If we multiply both sides of that equation by the position vector r, we obtain
rF= rma_tan
But τ = rF (as long as F is perpendicular to r). Thus,
τ = rma_tan
Recall a_tan = rα.
τ = rm(rα)
τ = r^2mα
Solve for angular acceleration:
α = τ/(mr^2)
We have done it! This is the rotational analog of Newton’s second law! In this, τ serves the same role as F in a = F/m (that is why τ is called the rotational analog of force!), and mr^2 serves the same role as m in a = F/m. The quantity mr^2 is sometimes called angular mass because of this fact. However, it is more often called rotational inertia or moment of inertia. I personally prefer the name of rotational inertia because when you increase mr^2 (either by increasing r or by increasing m), the ball becomes more sluggish to angularly accelerate. It has more rotational inertia.
Rotational inertia is such an important quantity that it is even given its own symbol. We denote it by the capital letter I. Our equation then becomes
α = τ/I
Or, if there are multiple torques,
α = Στ/I
Certainly, a mirror image of a = ΣF/m.
Let’s quickly do some reflection on this formula.
If the net torque that acts on a rotational system is constant, increasing the moment of inertia would decrease the angular acceleration (since α ∝ 1/I). To increase the moment of inertia, you can either make the mass of the system greater or you can increase the distance at which the mass rotates from the axis. This relationship can be seen with ice skaters. When spinning, they will extend their arms (increasing r in I = mr^2), which causes them to rotate slower.
Similarly, if the moment of inertia decreased, the angular acceleration would increase. In the context of ice skaters, an ice skater might pull their arms in, which would cause them to rotate faster, despite them not applying any additional torque.
If torque increased while keeping rotational inertia constant, angular acceleration would increase (since α ∝ Στ). If torque decreased, angular acceleration would decrease.
An important thing to note is that the formula we obtained for rotational inertia only applies for point masses, where all of the mass is rotating at a distance r. The rotational inertias of other systems (e.g., rods, cylinders, spheres, etc.) can be derived with some nice calculus. If you know calculus, I heartily recommend you look up such derivations. Lucky for us, α = Στ/I works for all formulas of I.
More problems!
No mercy. Here’s a hard problem:
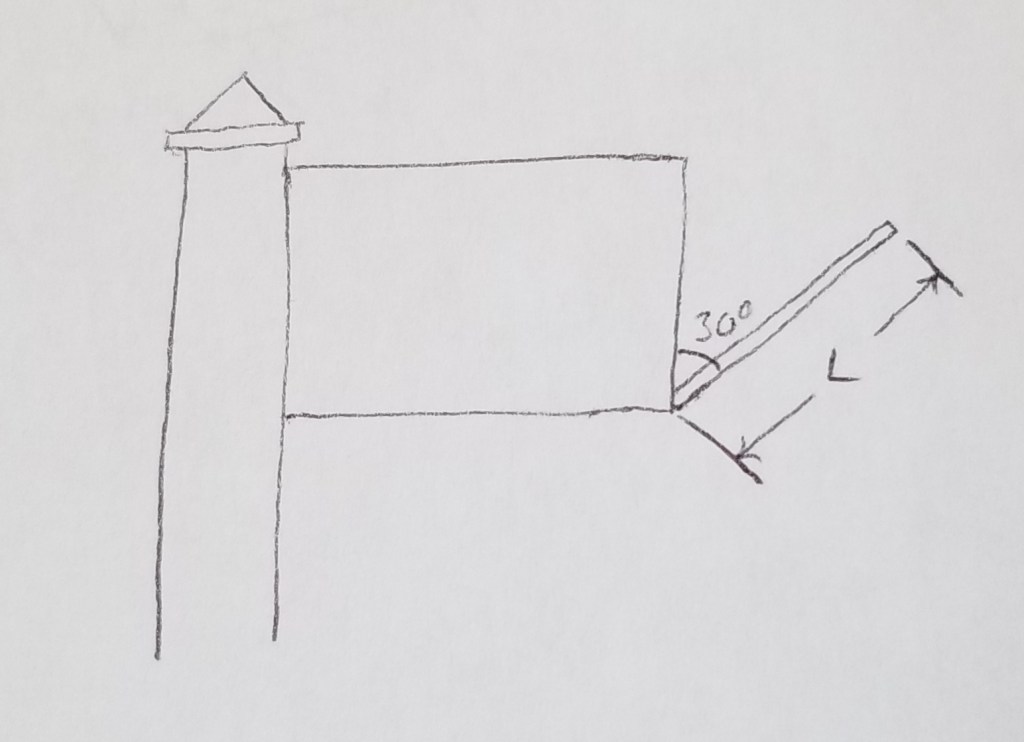
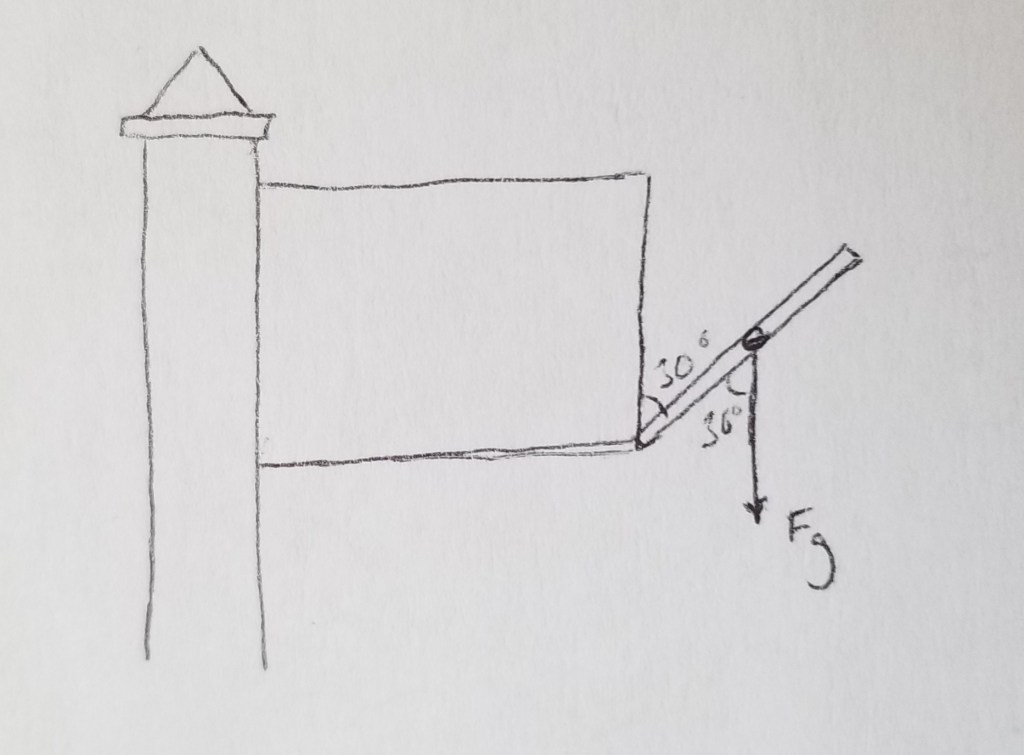
Suppose the door of your mailbox falls open due to gravity. When the door is 30° open, the door has an angular acceleration of 49 rad/s^2. What is the height L of the door? (Assume the door is of uniform density and air resistance is negligible.)
Soln. This is a deceptively hard problem. First off, let’s write out the rotational form of Newton’s second law for our reference.
α = Στ/I
Since the only force present is gravity, the torque it produces is the net torque. Thus, we can write
Στ = rF_gsinθ
The moment of inertia for a rod is I=(1/3)mL^2. Thus, we now have
α = rF_gsinθ/((1/3)mL^2)
But F_g = mg. Thus,
α = rmgsinθ/((1/3)mL^2)
Cancel the m’s:
α = rgsinθ/((1/3)L^2)
The position vector of the force of gravity would be L/2 because the force of gravity acts at the center of mass (since the door is of uniform density, the center of mass is at the geometric center). Also, since the 30° angle and θ are interior alternate angles, θ = 30°.
We can input all our known values now.
49 = (L/2)(9.8)sin(30°)/((1/3)L^2)
Cancel L:
49 = (1/2)(9.8)sin(30°)/((1/3)L)
Solve for L
49 = (4.9)(1/2)/((1/3)L)
49 = (3/2)(4.9)/L
L = (3/2)(4.9)/49
L = 0.15 m
Boom! Your mailbox door is 0.15 m tall. Physics is amazing!
You probably get the point with that one problem. That’s essentially all I know about torque without getting into tangential concepts.
